Implementation Details
The system architectural overview is illustrated in the following figure:
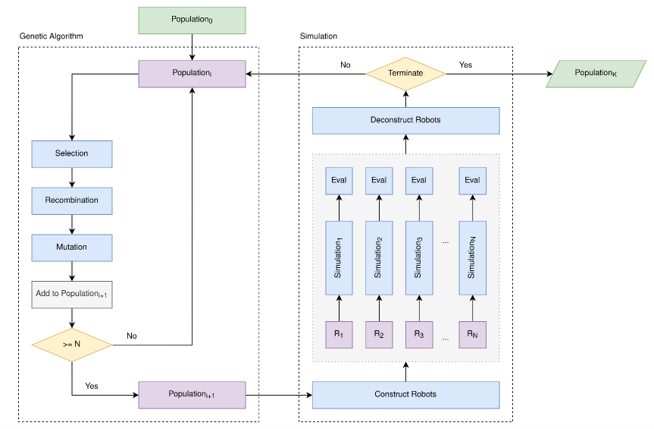
Architectural overview
Observations
The mobile robot is equipped with five range sensors that can detect obstacles and provide an output of either 1 or 0, depending on whether an obstacle was detected or not, respectively. Moreover, the space around the robot is divided into eight sections of 45 degrees each and it checks in which of these sections the angle to the goal belongs to.
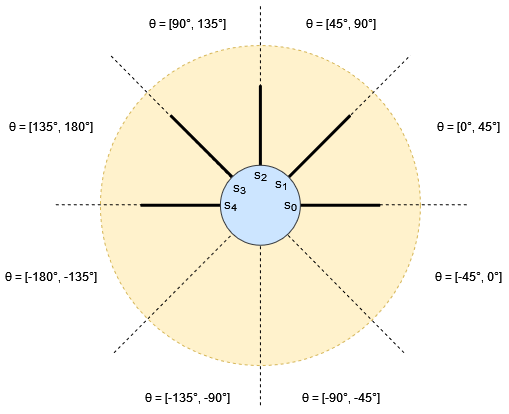
Observation space
A sample input to the controller consists of:
Angle-to-Goal |
Sensors |
|||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
A_0 |
A_1 |
A_2 |
A_3 |
A_4 |
A_5 |
A_6 |
A_7 |
S_0 |
S_1 |
S_2 |
S_3 |
S_4 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
indicating that the angle to the goal lies within the first interval of [0◦, 45◦] and that sensors s1 and s4 have detected an obstacle.
Actions
The robot uses the unicycle model. It is provided with a constant linear velocity and the angular velocity is computed by the controller. So, the robot can take eight different actions that correspond to the following angular velocities:
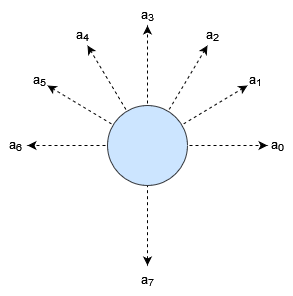
The robot’s actions
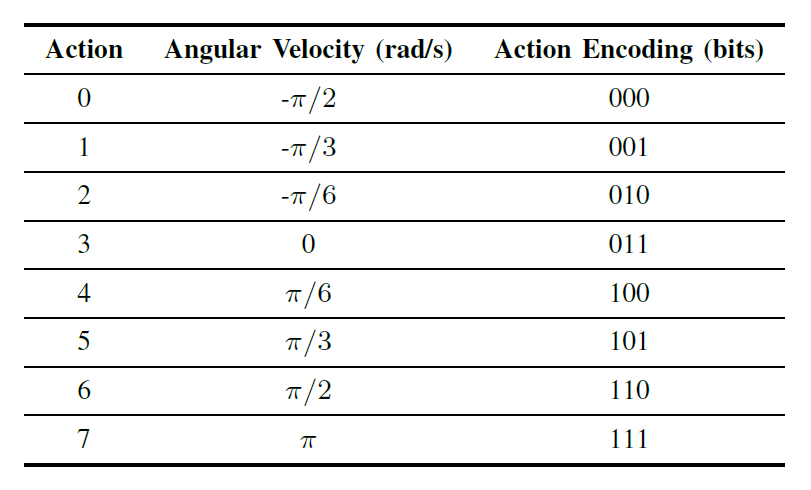
The encoding of the actions
Chromosome Encoding
To ensure that the GA chromosome always comprises of a valid solution, the algorithm uses a binary encoding with 213 possible input observations and 23 possible actions.
The encoding procedure consists of:
- Step 1
Assume that the observation ‘0000000100000’ corresponds to the optimal action ‘001’.
E.g., ‘0000000100000’ → ‘001’
- Step 2
Convert the observation bit sequence into a decimal value.
(0000000100000)2= (32)10
So, 32 → ‘001’
This decimal value corresponds to a position in the chromosome.
- Step 3
This position encodes the optimal action (consisting of a sequence of 3 bits) for that particular input combination.
So, in the position 32 of the chromosome, the sequence ‘001’ will be present which represents the action to take (action 1).
xxx xxx xxx xxx xxx xxx xxx xxx xxx … 001 … xxx xxx xxx
Genetic Algorithm Elements
For the elements of the GA, the following operations are utilized:
- Selection: Tournament Selection
Selects the fittest individual with probability p from a tournament size S
- Recombination: Multi-Point Crossover
Swaps two chromosomes at N different points
- Mutation: Bit Flip Inversion
Randomly flips M bits with probability p of each bit being flipped

Genetic Algorithm diagram